

Bio-Inspired Soft Robotic Grippers and Manipulators
Reference:
- Xingwen Zheng, Ningzhe Hou, Pascal Johannes Daniel Dinjens, Ruifeng Wang, Chengyang Dong, and Guangming Xie, A Thermoplastic Elastomer Belt Based Robotic Gripper. IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE IROS), 2020.
- Xingwen Zheng, Hao Mo, Haoran Yao, and Fumihito Arai, A 3D-Printed Centimeter-Scale Pneumatically Actuated Robotic Manipulator for Micro-Manipulations. International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2024. (Best Application Paper Award Nomination)
- Mingxin Wu, Xingwen Zheng*, Ruosi Liu, Ningzhe Hou, Waqar Hussain Afridi, Rahdar Hussain Afridi, Xin Guo, Jianing Wu, Chen Wang, and Guangming Xie*, Glowing sucker octopus (Stauroteuthis syrtensis)-inspired soft robotic gripper for self-adaptive grasping. Advanced Science, 2022. (as Co-PI; Selected as Cover Article)
- Ningzhe Hou†, Mingxin Wu†, Qin Zhao, Zhenhua Tang, Mianming Zhang, Xiaoxian Xu, Xingwen Zheng*, Guangming Xie*, Reticular origami soft robotic gripper for shape-adaptive and rapid grasping, Soft Robotics, 2024. (as Co-PI; Selected as Cover Article)
- Mingxin Wu, Waqar Hussain Afridi, Jiaxi Wu, Rahdar Hussain Afridi, Kaiwei Wang, Xingwen Zheng, Chen Wang, Guangming Xie*, Octopus-inspired underwater soft robotic gripper with crawling and swimming capabilities, Research, 2024.
-
The following videos and photos can also be found at: https://space.bilibili.com/3493272800463582
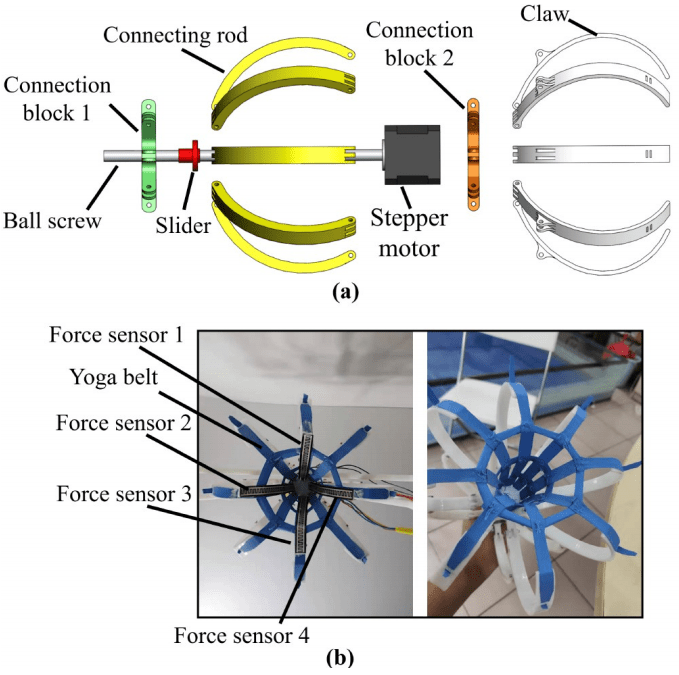
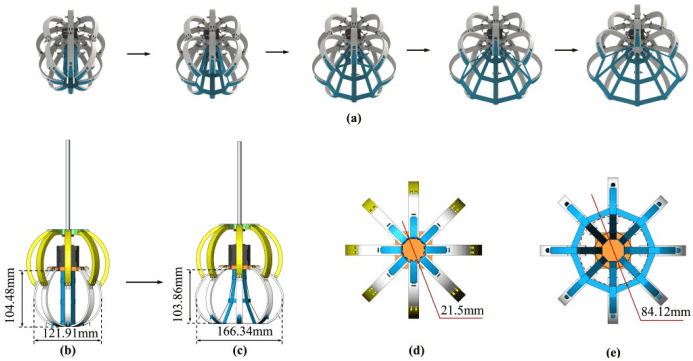
Part I: Reticular Kirigami soft robotic gripper for shape-adaptive and rapid grasping
网状折纸软机器人抓取手
Co-supervised with Prof. Guangming Xie (Peking University)
Ph.D. students: Ningzhe Hou (University of Oxford) and Mingxin Wu (Peking University)

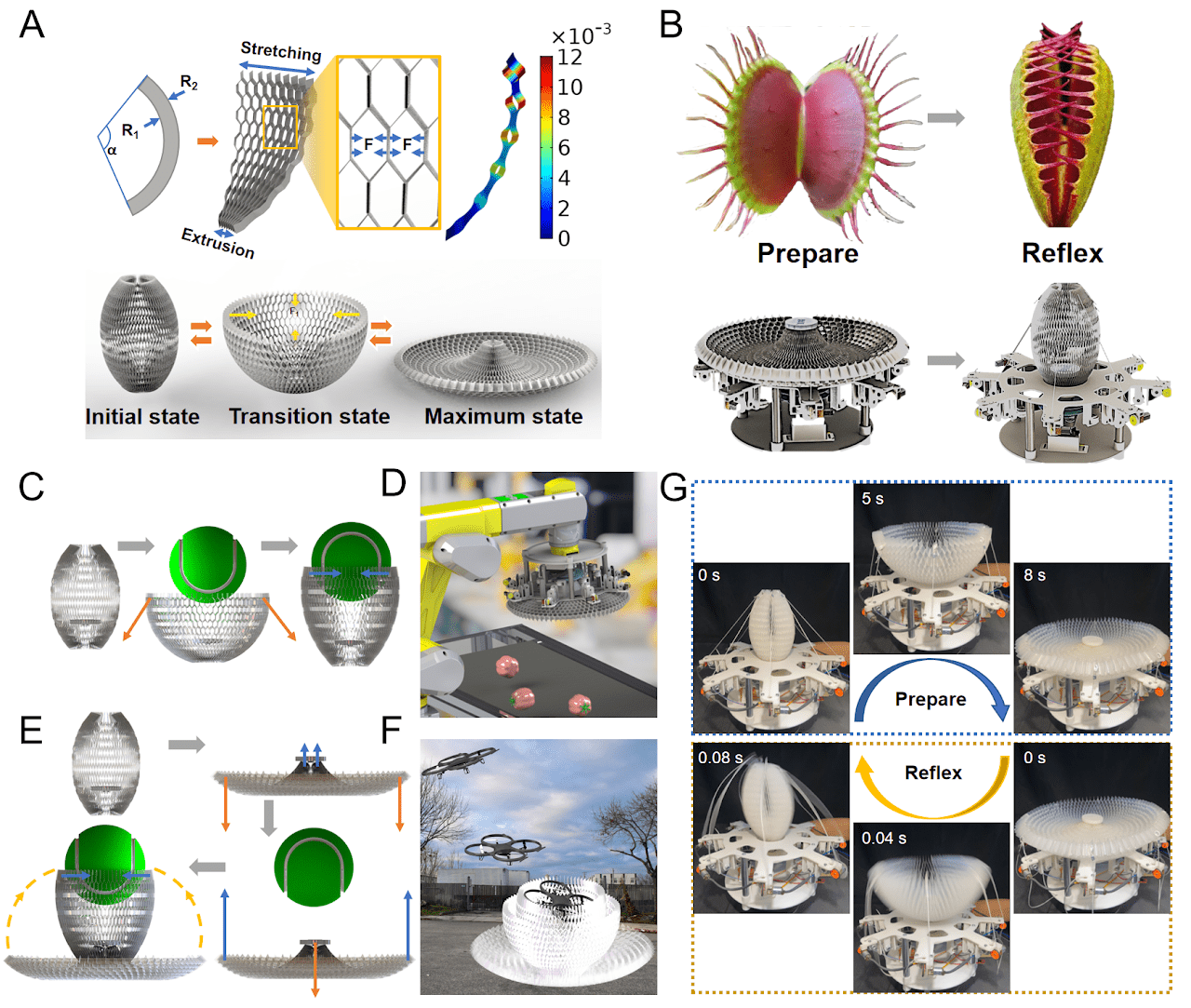

Rapid grasping
网状折纸软机器人抓取手的快速抓取动作的展示
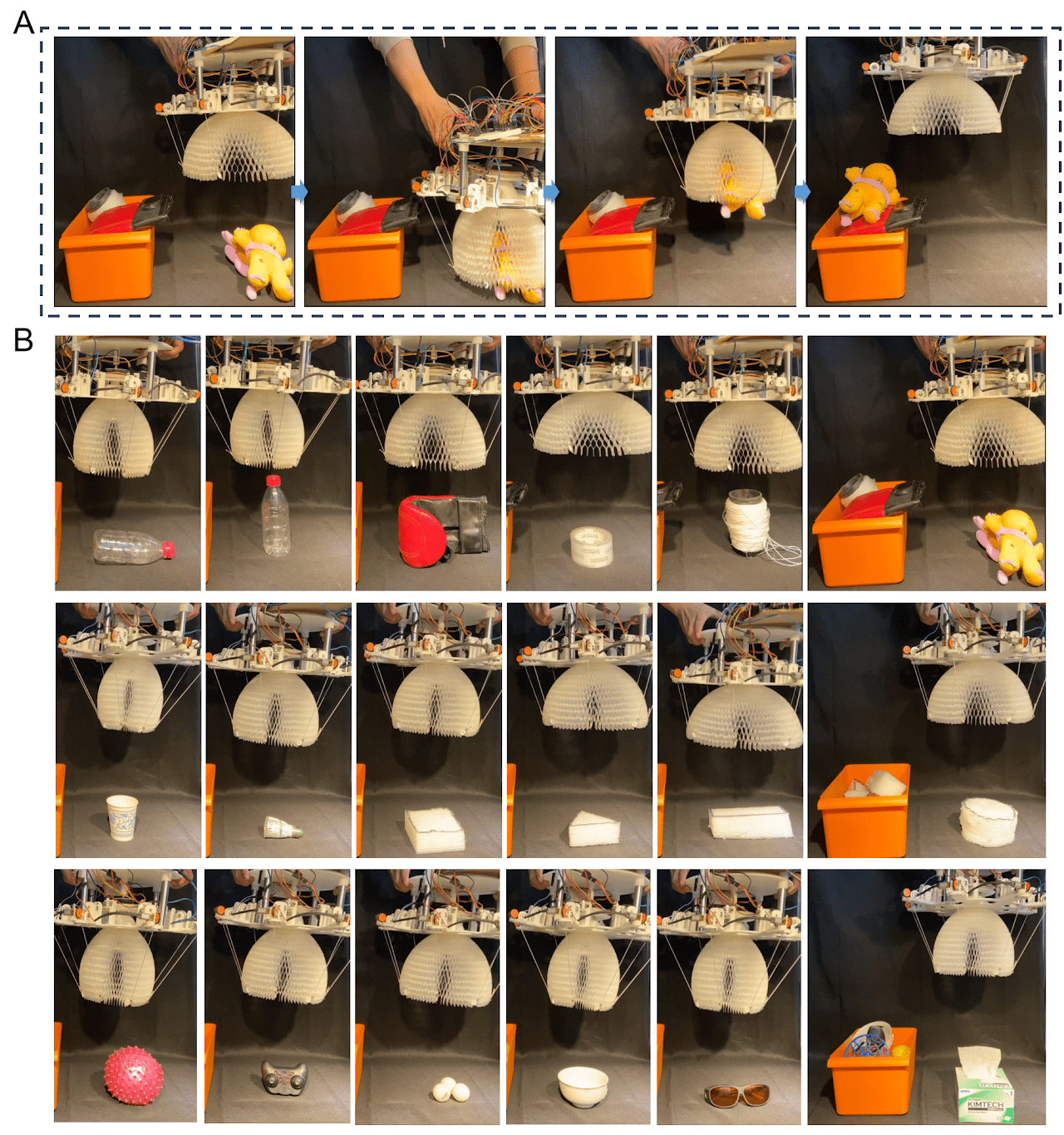
Grasping various objects
网状折纸软机器人抓取手对多种物体的抓取展示
Capturing a flying table tennis ball
网状折纸软机器人抓取手抓取运动中的乒乓球
The demonstration of the gripper catching a goldfish in the water
网状折纸软机器人抓取手在水中抓金鱼的演示
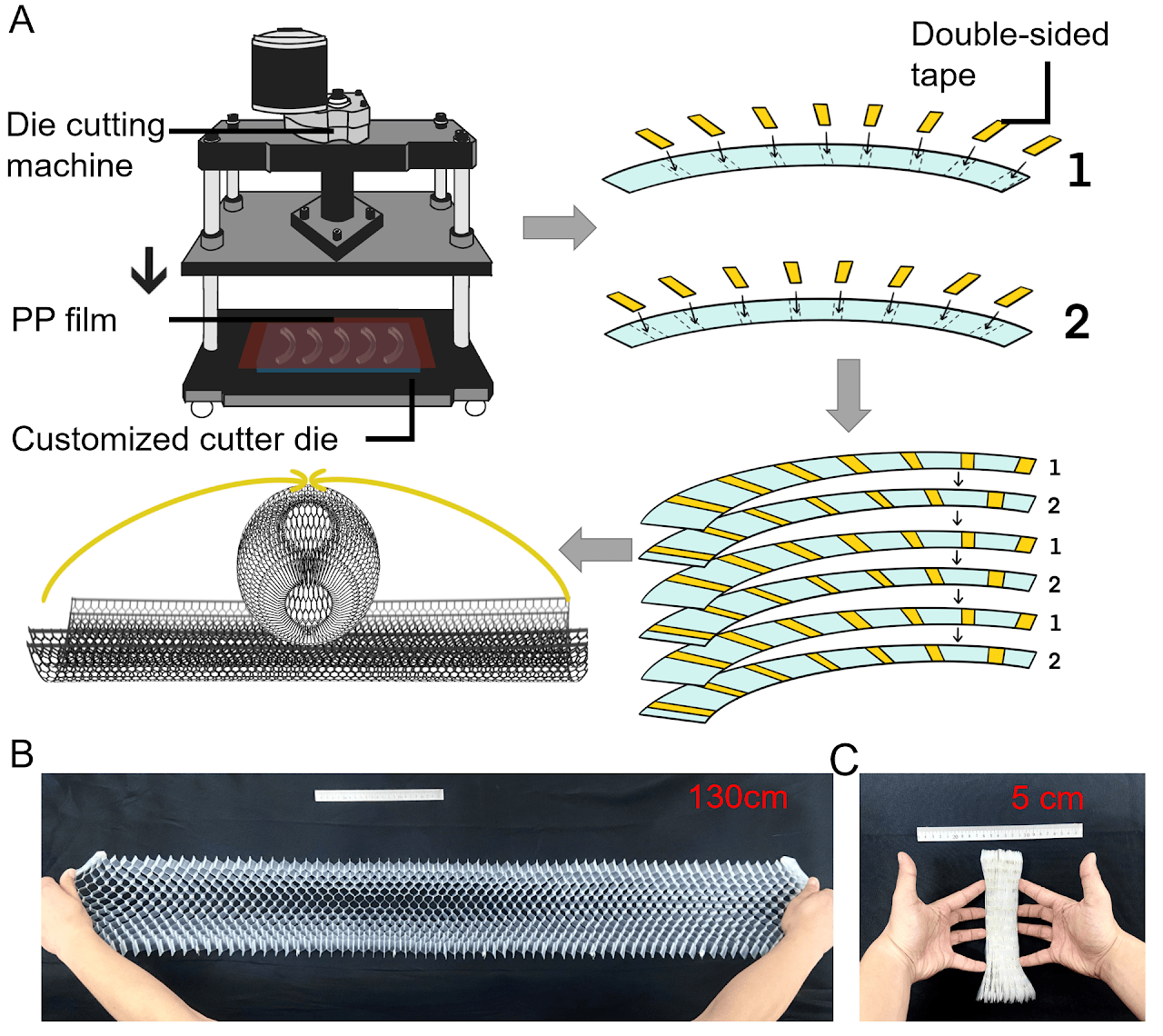
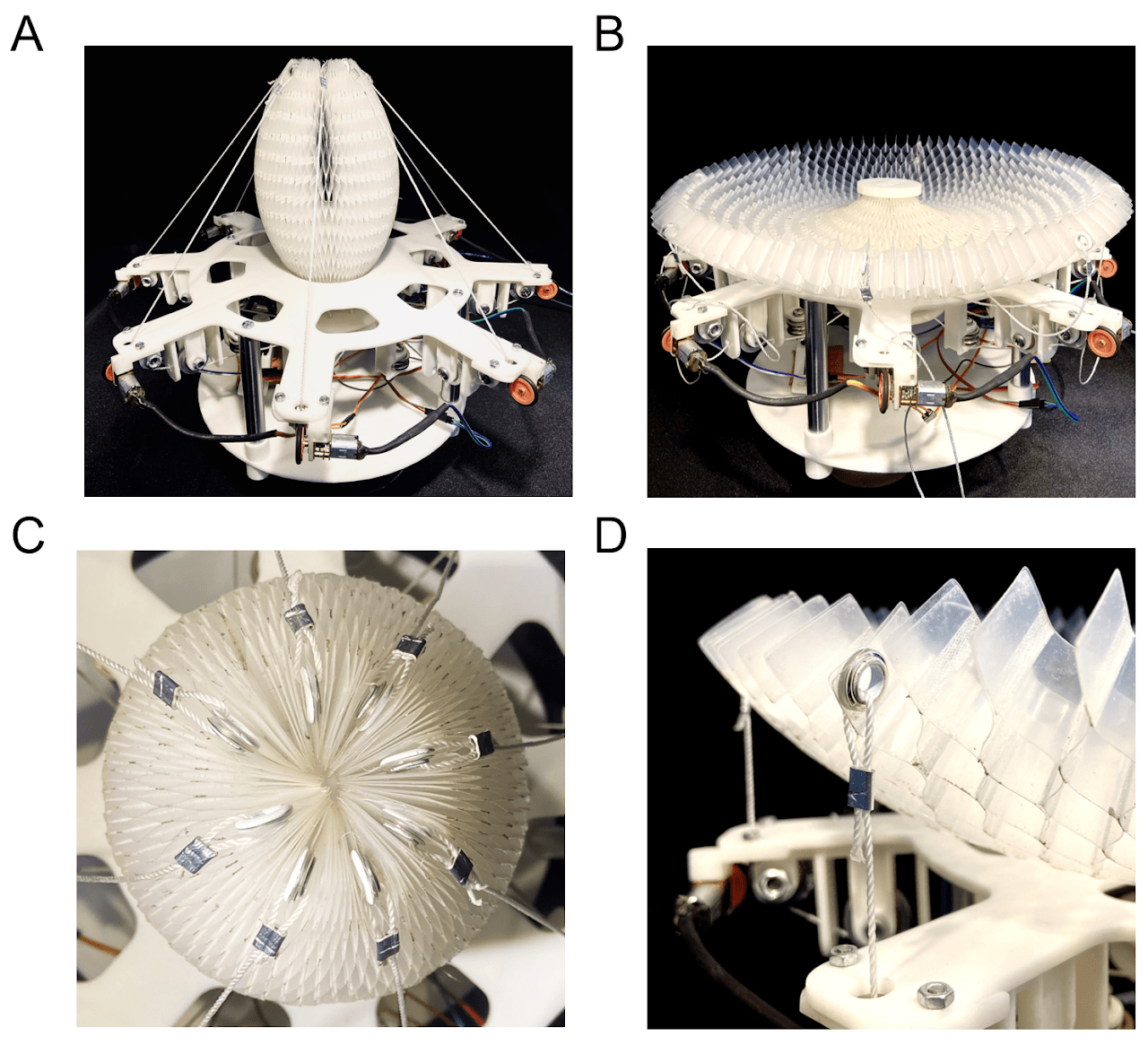
The reticular origami structure
网状折纸软机器人抓取手的网状折纸结构的制作工艺和拉伸性能
The diameter sensing of different objects
网状折纸软机器人抓取手对不同物体的尺寸的感知
The shuttlecock lands on different positions on the gripper to trigger the rapid grasping
羽毛球落在网状折纸软机器人抓取手的不同位置以触发快速抓取
Capturing the toy drone that lands vertically, with a certain angle, and over the gripper
网状折纸软机器人抓取手抓取飞过的无人机
The demonstration of the gripper captures objects at different placing angles
网状折纸软机器人抓取手以不同放置角度捕捉物体
Part II: A Thermoplastic Elastomer Belt Based Robotic Gripper
基于热塑性弹性体带的机器人抓取手
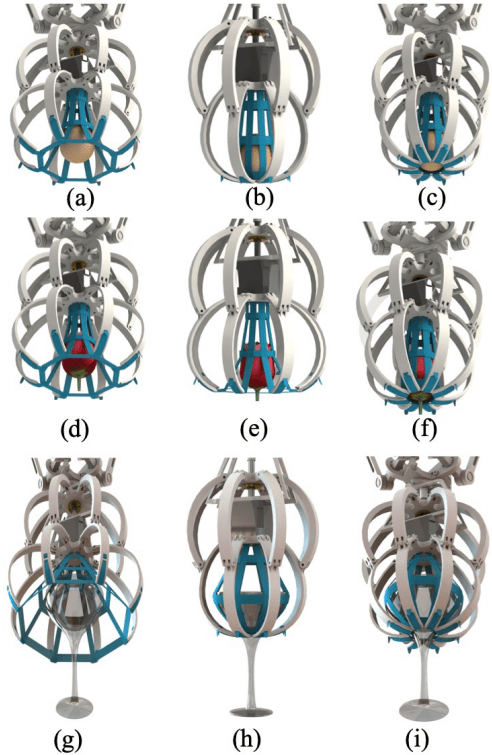

Part III: A glowing sucker octopus (Stauroteuthis syrtensis)-inspired soft robotic gripper for self-adaptive grasping
受发光章鱼启发的软体抓取手
Grasping multiple objects in the air
受发光章鱼启发的软体抓取手的展开和闭合动作
Grasping objects with different convex and concave surfaces under the water
受发光章鱼启发的软体抓取手的水下抓取应用展示
Grasping a turtle under the water
受发光章鱼启发的软体抓取手的活体抓取应用展示
Part IV. A 7-DOF centimeter-scale pneumatically actuated robotic manipulation system for cell manipulations
To be updated...