

Robotic Fish
References:
- Xingwen Zheng*, Wei Wang, Minglei Xiong, and Guangming Xie*, Online State Estimation of a Fin-Actuated Underwater Robot Using Artificial Lateral Line System. IEEE Transactions on Robotics (T-RO), 2020.
- Xingwen Zheng, Minglei Xiong, Runyu Tian, Junzheng Zheng, Manyi Wang, and Guangming Xie*, Three-Dimensional Dynamic Modeling and Motion Analysis of a Fin-Actuated Robot. IEEE/ASME Transactions on Mechatronics (T-MECH), 2022.
- Xingwen Zheng, Chen Wang, Ruifeng Fan, and Guangming Xie*, Artificial Lateral Line Based Local Sensing between Two Adjacent Robotic Fish. Bioinspiration & Biomimetics, 2018. (2018-2020 IOP Publishing China Top Cited Paper Award 2018-2020英国物理学会中国高被引文章奖)
- Xingwen Zheng, Wei Wang, Liang Li, and Guangming Xie*, Artificial Lateral Line Based Relative State Estimation Between an Upstream Oscillating Fin and a Downstream Robotic Fish. Bioinspiration & Biomimetics, 2020.
- Xingwen Zheng, Manyi Wang, Junzheng Zheng, Runyu Tian, Minglei Xiong, and Guangming Xie, Artificial Lateral Line Based Longitudinal Separation Sensing for Two Swimming Robotic Fish with Leader-Follower Formation. IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE IROS), 2019. (IEEE Student Support Grant Winner)
- Xingwen Zheng, Minglei Xiong, and Guangming Xie, Data-Driven Modeling for Superficial Hydrodynamic Pressure Variations of Two Swimming Robotic Fish with Leader-Follower Formation. IEEE International Conference on Systems, Man, and Cybernetics (IEEE SMC), 2019. (IEEE Student Support Grant Winner)
- Xingwen Zheng, Hua Chen, Ouyang Jiao, Minglei Xiong, Wei Zhang, and Guangming Xie, Model Predictive Tracking Control Design for a Robotic Fish with Controllable Barycentre. The 45th Annual Conference of the IEEE Industrial Electronics Society (IEEE IECON), 2019.
- Xingwen Zheng, Wei Wang, Chen Wang, Ruifeng Fan, and Guangming Xie, An Introduction of Vision-Based Autonomous Robotic Fish Competition. The 12th World Congress on Intelligent Control and Automation (IEEE WCICA), 2016.
- Liang Li*, Xingwen Zheng*, Rui Mao, and Guangming Xie, Energy saving of schooling robotic fish in three-dimensional formations. IEEE Robotics and Automation Letters, 2021. (Presented in IEEE ICRA)
- Yufan Zhai, Xingwen Zheng*, and Guangming Xie*, Fish lateral line inspired flow sensors and flow-aided control: A review. Journal of Bionic Engineering, 2020. (Invited Review 邀请综述)
- Guangming Xie* and Xingwen Zheng*. Bionic Sensing with Artificial Lateral Line Systems for Fish-Like Underwater Robots. CRC Press, Taylor & Francis Group, 2022.
- Junzheng Zheng, Xingwen Zheng, Tianhao Zhang, Minglei Xiong, and Guangming Xie*, Dual-Sensor Fusion Based Attitude Holding of a Fin-Actuated Robotic Fish. Bioinspiration & Biomimetics, 2020.
-
The following videos and photos can also be found at: https://space.bilibili.com/3493272800463582
Part I: Multiple-Fins-Actuated Boxfish-Like Robot
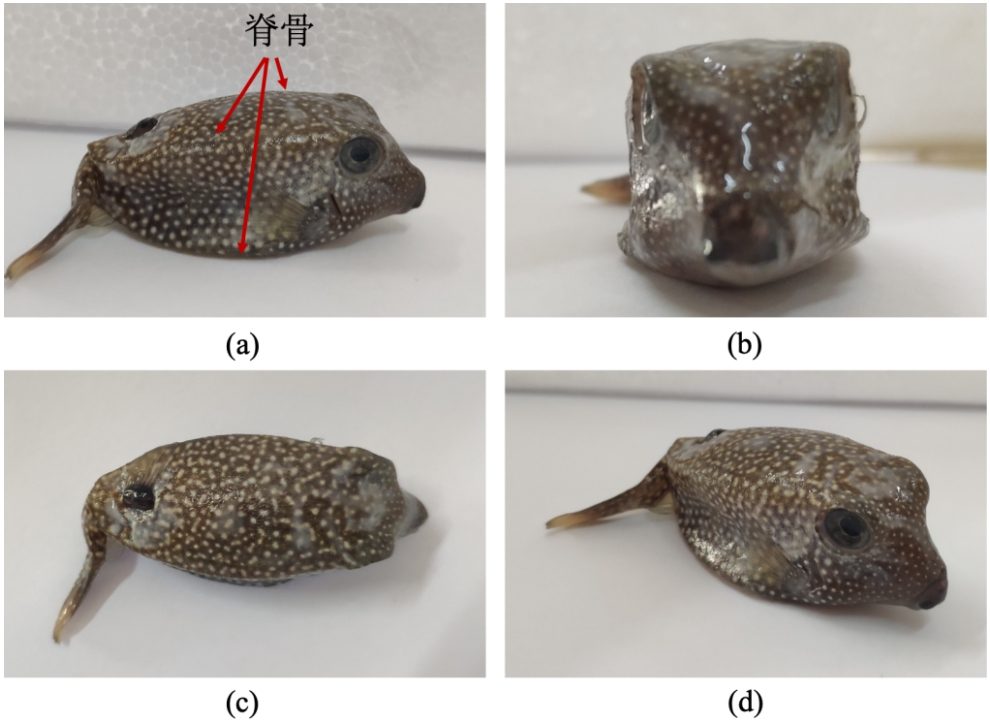
Real boxfish in nature
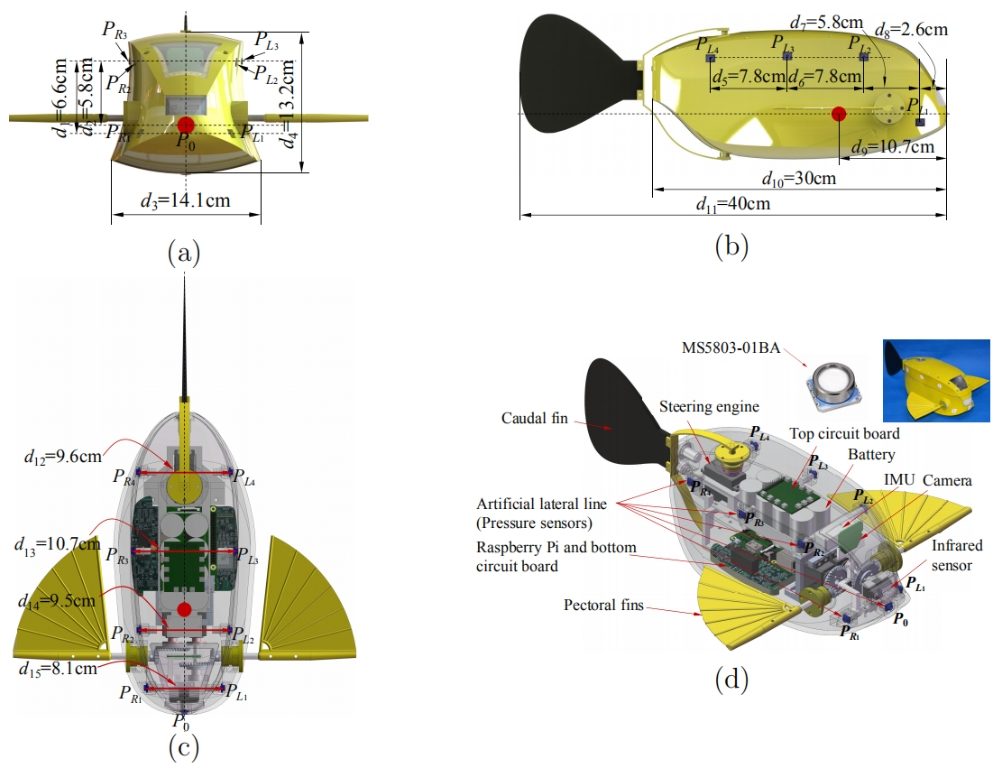
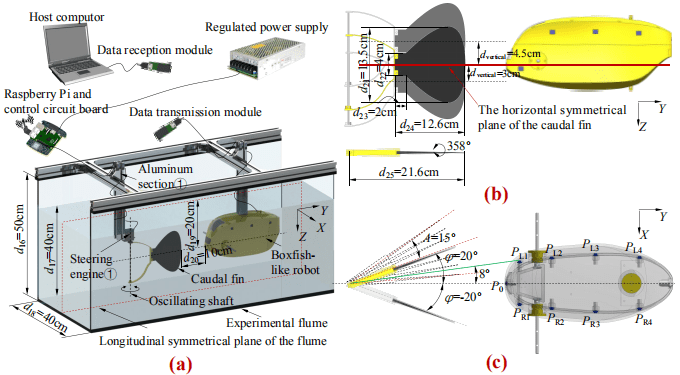
Multiple-fins-actuated boxfish-like robot

Animation obtained by SolidWorks Motion (By Xingwen Zheng)

Virtual Assembly of the boxfish-like robot (By Xingwen Zheng)
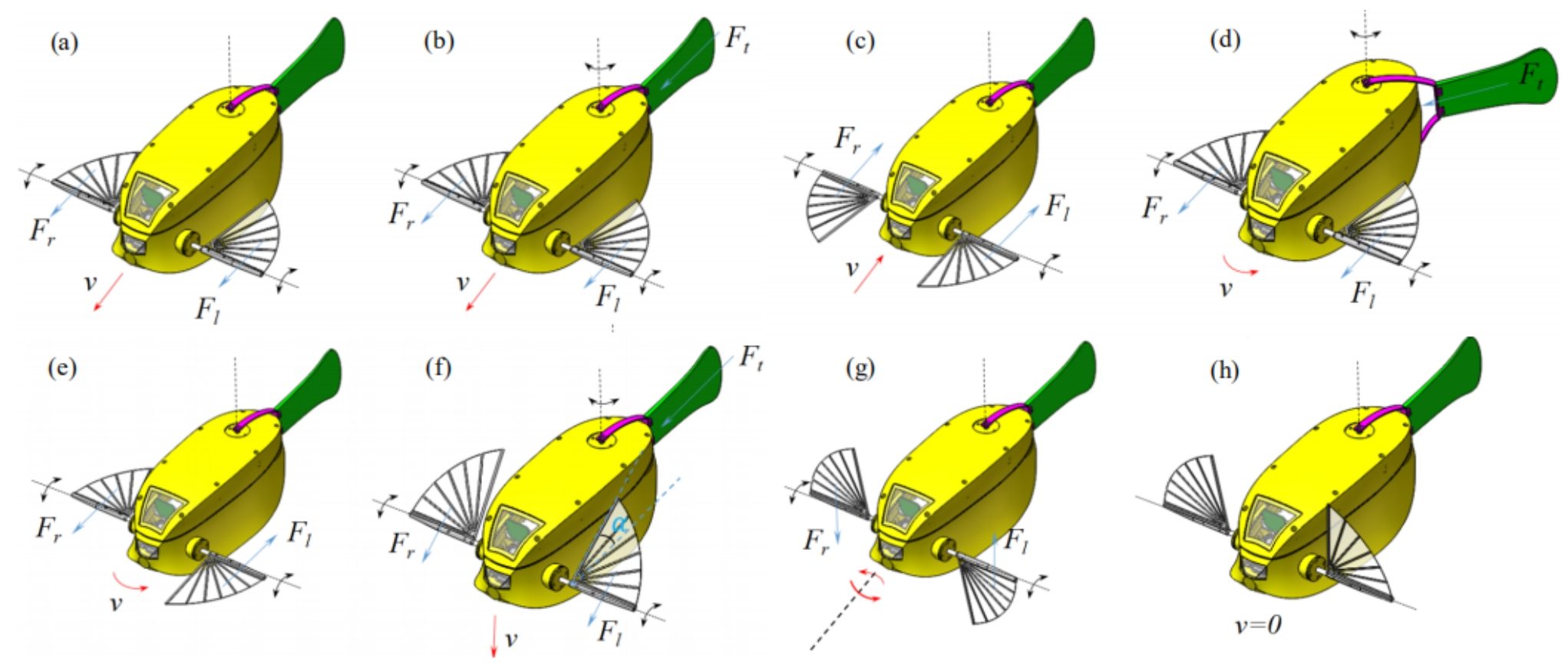
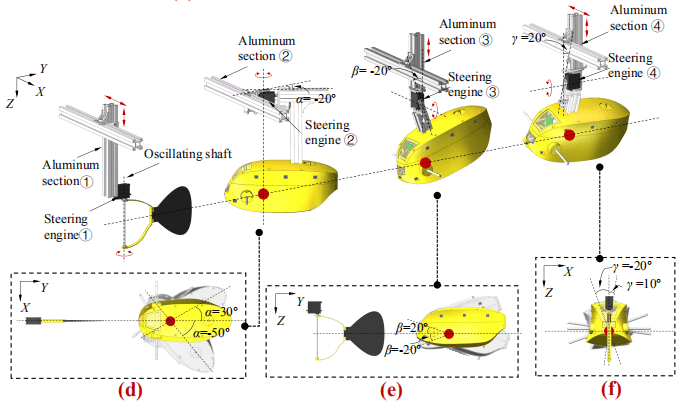
Multiple swimming pattern of the boxfish-like robot. (a) Forward swimming actuated by pectoral fins. (b) Forward swimming by pectoral fins and caudal fin. (c) Backward swimming by pectoral fins. (d) Turning by caudal fin and pectoral fins. (e) Yawing motion by pectoral fins. (f) Pitching motion by pectoral fins. (g) Rolling motion by pectoral fins. (h) Stop the forward motion by pectoral fins.

Spiral motion (Video by Xingwen Zheng)

Forward swimming by caudal fin (Video by Xingwen Zheng)

Forward swimming by pectoral fins (Video by Xingwen Zheng)

Forward swimming by pectoral fins and caudal fin (Video by Xingwen Zheng)

Turning swimming by caudal fin (Video by Xingwen Zheng)

Turning swimming by pectoral fins and caudal fin (Video by Xingwen Zheng)

Backward swimming by pectoral fins (Video by Xingwen Zheng)
Experiments for investigating artificial lateral line based local sensing between two adjacent robotic fish (Photo by Xingwen Zheng)
Two adjacent robotic fish with relative attitudes in the experiments (Photo by Xingwen Zheng)
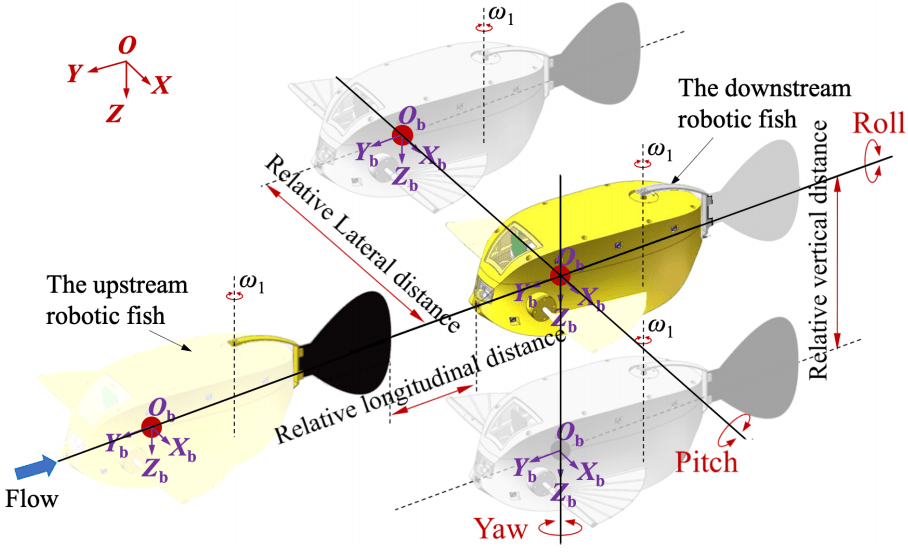
Relative positions between two adjacent boxfish-like robot (Photo by Xingwen Zheng)
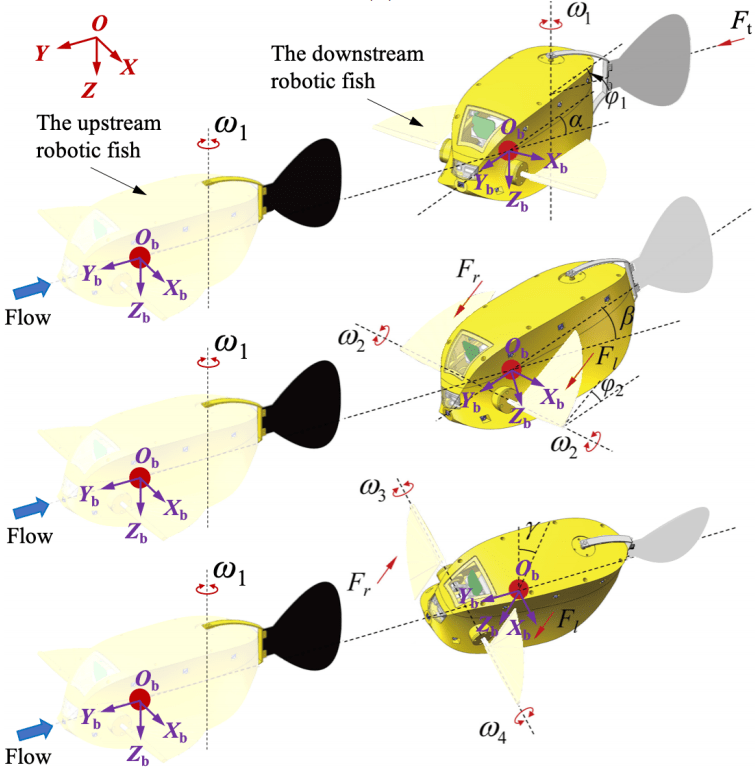
Relative attitudes between two adjacent boxfish-like robot (Photo by Xingwen Zheng)

Animation showing relative positions between two adjacent boxfish-like robot (Animation by Xingwen Zheng)

Animation showing relative attitudes between two adjacent boxfish-like robot (Animation by Xingwen Zheng)

More content will be presented later. Welcome to email me to request more details.
Part II: Active-Tail-Actuated Robotic Fish with Barycentre Regulating Mechanism
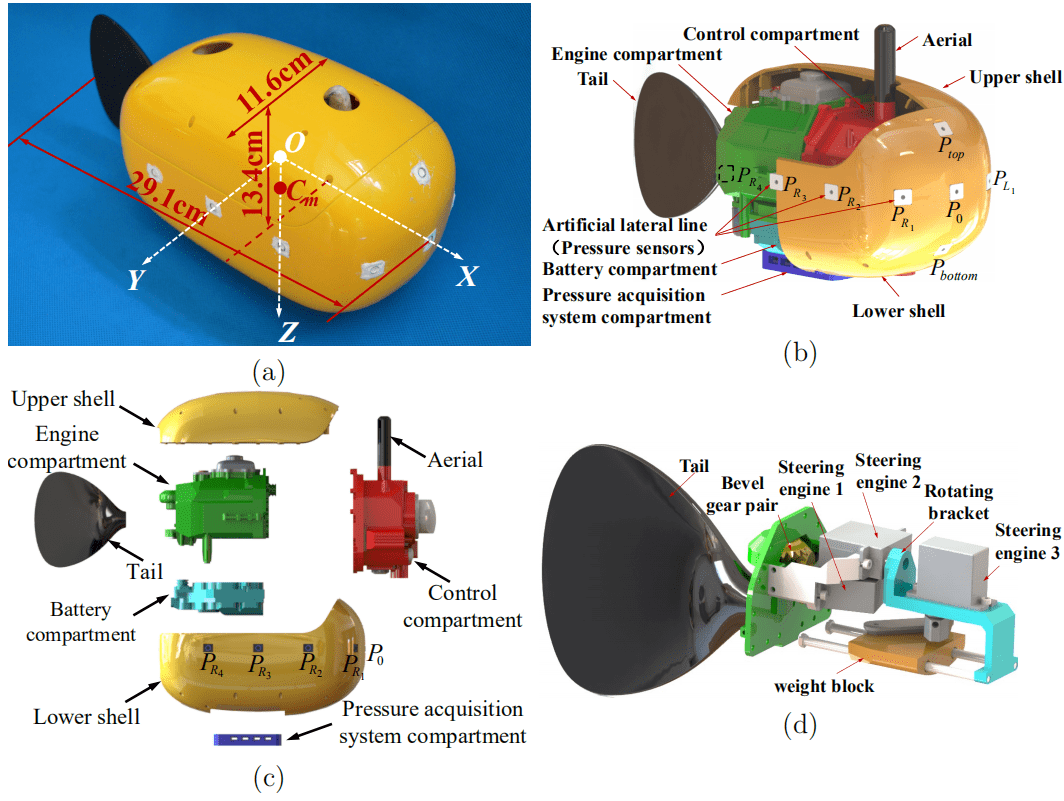
Prototype and components of the single-tail-actuated boxfish-like robot (Photo by Xingwen Zheng)
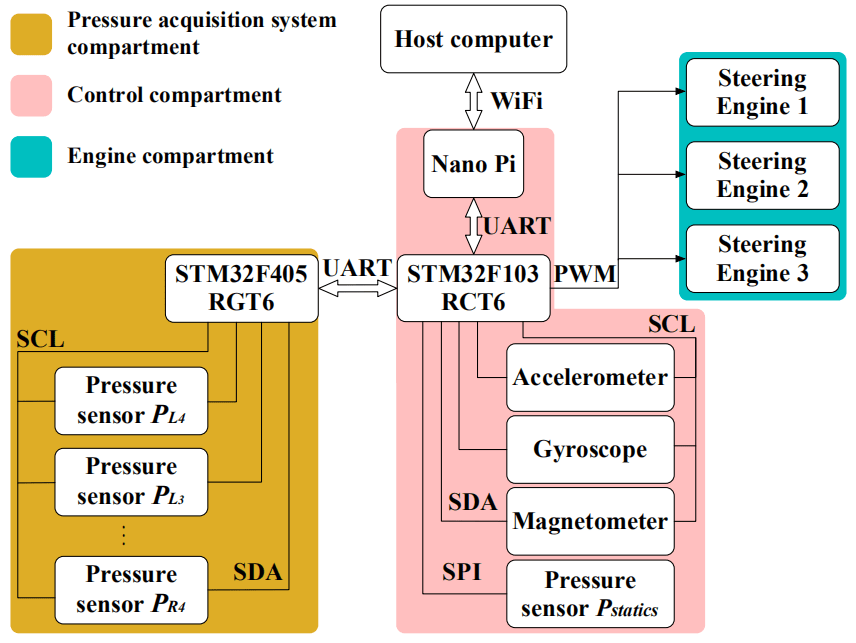
Control system of the single-tail-actuated boxfish-like robot (Photo by Xingwen Zheng)
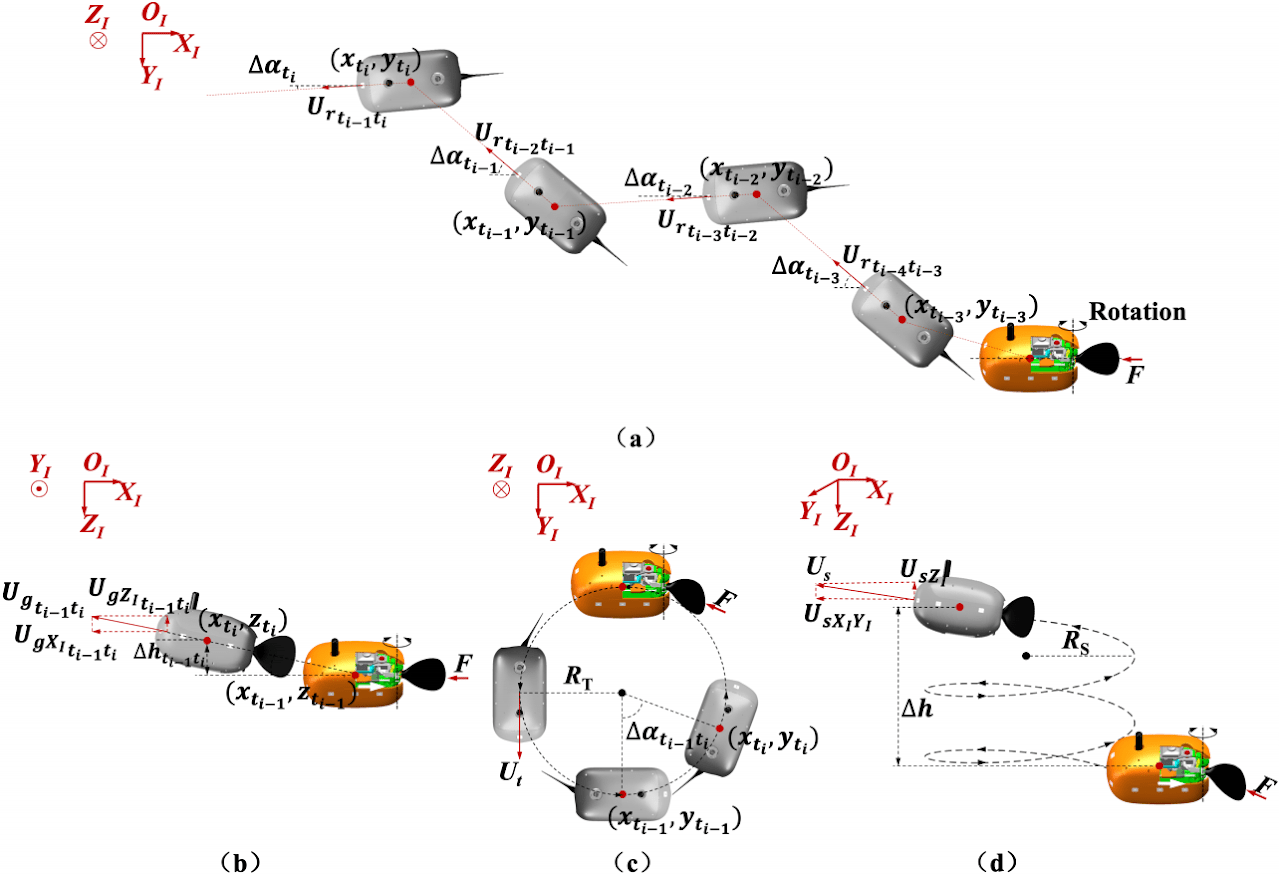
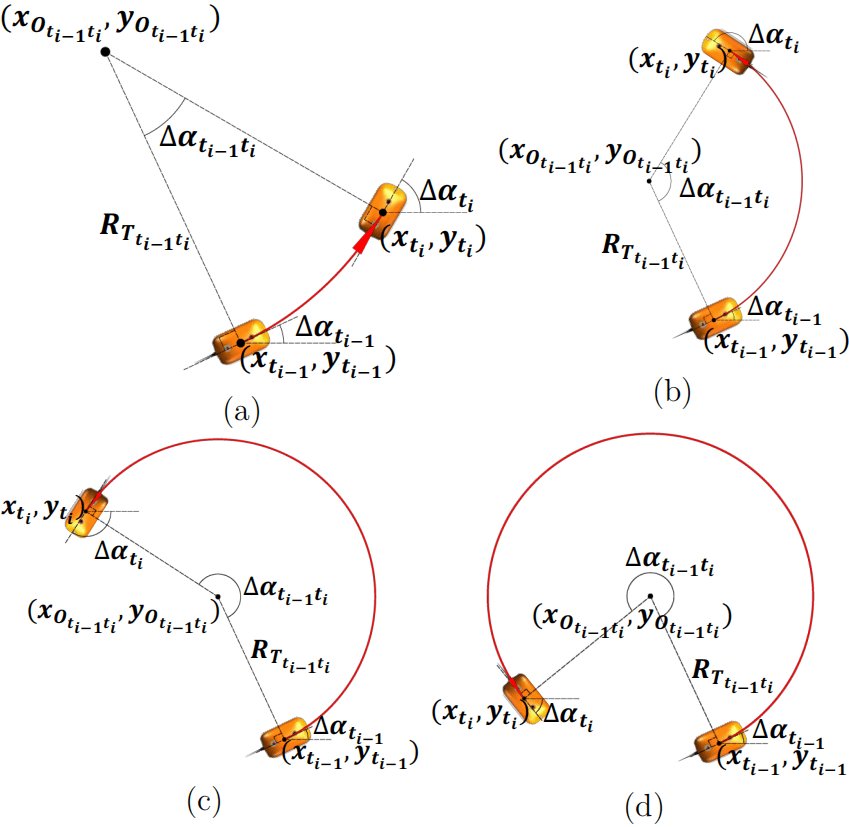
Multiple swimming patterns of the single-tail-actuated boxfish-like robot (Photo by Xingwen Zheng). (a) Turning swimming. (b) Forward swimming. (c) Gliding Swimming. (d) Spiral swimming.
Online State Estimation of a Fin-Actuated Underwater Robot Using Artificial Lateral Line System (Photo by Xingwen Zheng)

Forward swimming and turning swimming of the boxfish-like robot (Photo by Xingwen Zheng)

Ascending motion of the boxfish-like robot (Photo by Xingwen Zheng)

Spiral swimming of the boxfish-like robot (Photo by Xingwen Zheng)
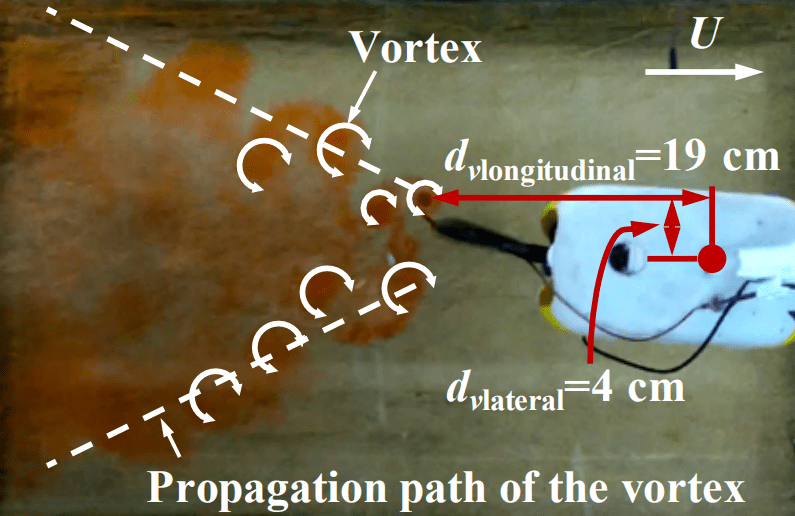
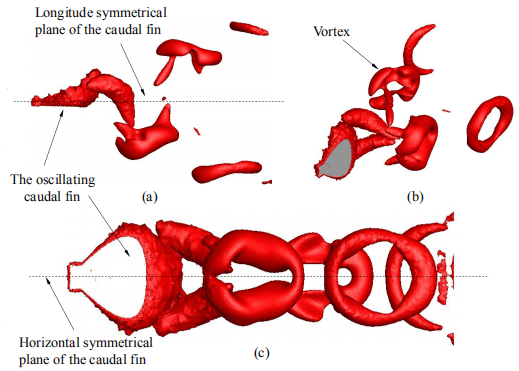
Flow visualization for the oscillating-caudal-fin-generated vortex wake using the dye injection technique.
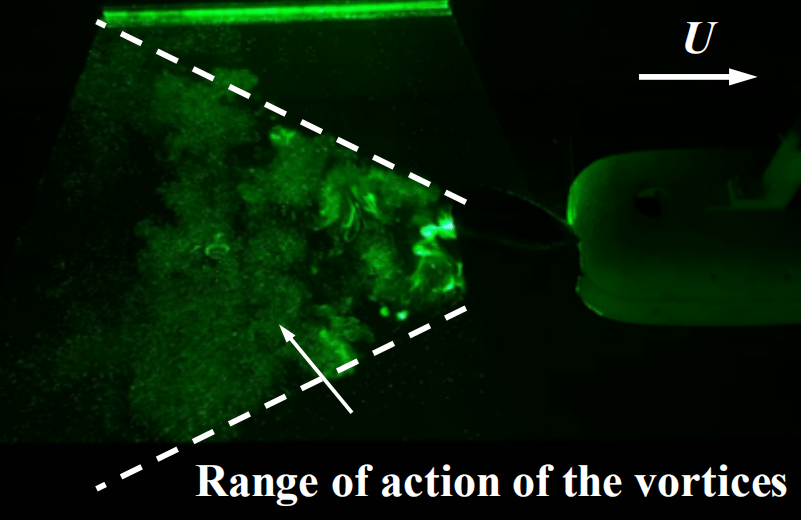
Flow visualization for the oscillating-caudal-fin-generated vortex wake using the hydrogen bubble technique.
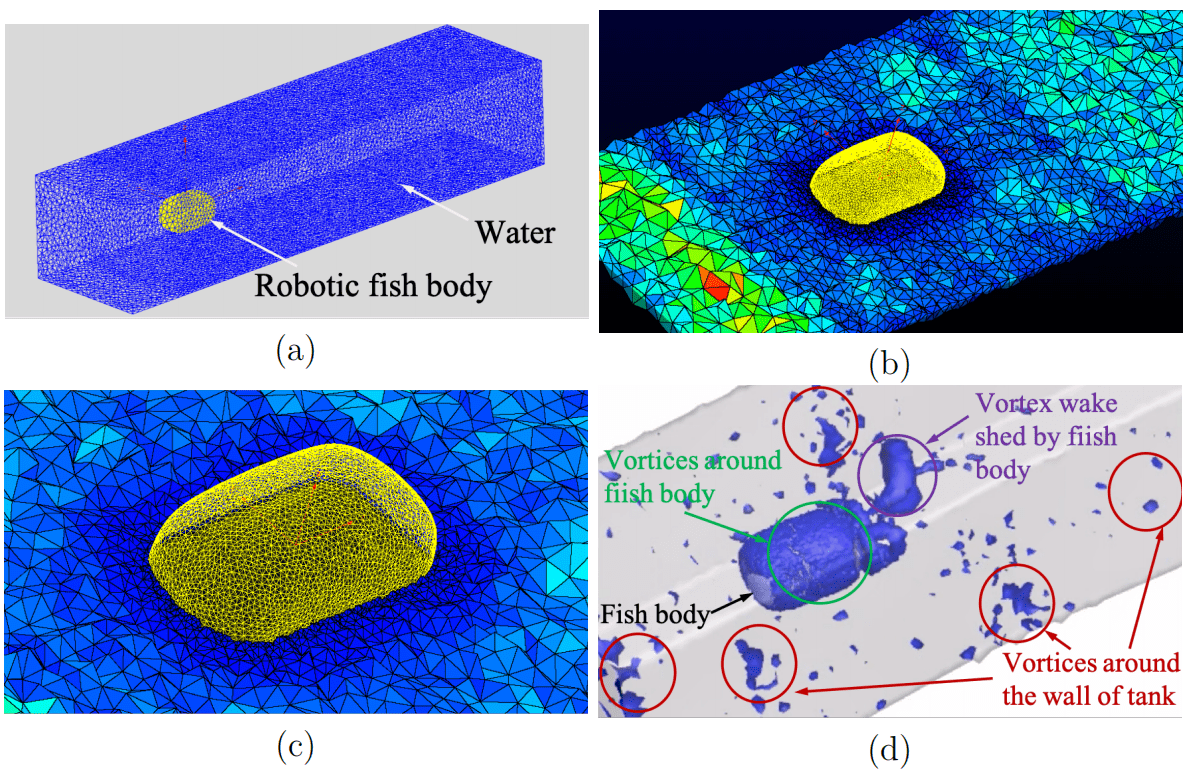
Unstructured grids and vortex structure in computational fluid dynamics (CFD) simulation. (a) Grids of the calculation domain. (b) Wall grid of the fish body and volume grid around the fifish body. (c) Enlarged view of grids of fish body and the water around fish body. (d) Instantaneous vortex structure by Q-criterion around an oscillating fifish body.